
Holybro Pixhawk Jetson Baseboard
11 products sold in last 13 hours
Selling fast! Over 16 people have in their cart
40 people are viewing this right now
- Estimated Delivery : Up to 10 - 20 mins
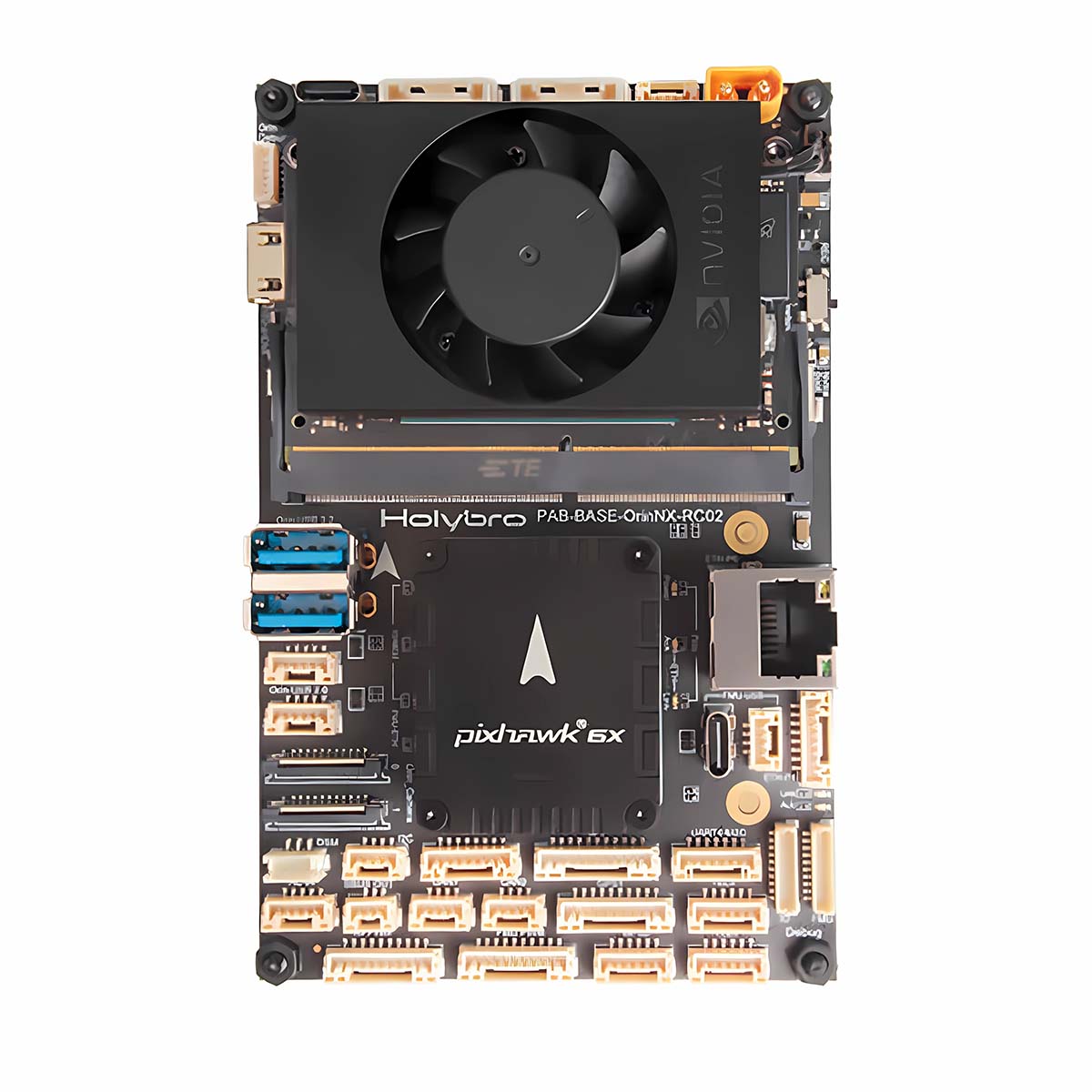
Holybro Pixhawk Jetson Baseboard Baseboard Description The Holybro Pixhawk Jetson Baseboard is based on the Pixhawk Autopilot Bus open source specification and the NVIDIA Jetson Orin NX/Nano Carrier Board. The Pixhawk Autopilot Bus (PAB) Form Factor enables this to be used with any PAB flight controller such as the Pixhawk 6X. Baseboard Port & Connection Jetson Connectors 2x Gigabit Ethernet port Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S) 8-pin JST-GH RJ45 2x MIPI CSI Camera Inputs 4 Lanes each 15-Pin Raspberry Pi Cam FFC 2x USB 3.0 Host Port USB A 5A Current Limit 2x USB 2.0 Host Port 5-Pin JST-GH 0A Current Limit USB 2.0 for Programming/debugging USB-C 2 Key M 2242 for NVMe SSD PCIEx4 2 Key E 2230 for WiFi/BT PCIEx2 USB UART I2S Mini HDMI Out 4x GPIO 6-pin JST-GH CAN Port Connected to Autopilot’s CAN2 (4 Pin JST-GH) SPI Port 7-Pin JST-GH I2C Port 4-Pin JST-GH I2S Port 7-Pin JST-GH 2x UART Port 1 for debug 1 connected to Autopilot’s telem2 Fan Power Port IIM42652 IMU Input Power XT30 Connector Voltage Rating: 7V-24V (3S-4S) Separate input power circuits than the Autopilot to ensure flight safety Holybro UBEC can be used for application above 4S Note: The Pixhawk Jetson Baseboard has an integrated UBEC to convert 7V-24V to 5.5V for the Jetson. Using an external UBEC alongside the integrated one provides redundancy and easier replacement in case of BEC failure. Power Requirements 8V/3A Minimum Depends on Usage and Peripherals Autopilot Connectors Pixhawk Autopilot Bus Interface 100 Pin Hirose DF40 50 Pin Hirose DF40 Redundant Digital Power Module Inputs I2C Power Monitor Support 2x – 6 Pin Molex CLIK-Mate Power Path Selector w/ Overvoltage Protection Voltage Ratings: Max input voltage: 6V USB Power Input: 4.75~5.25V Full GPS Plus Safety Switch Port 10-Pin JST-GH Secondary (GPS2) Port 6-pin JST-GH 2x CAN Ports 4 Pin JST-GH 3x Telemetry Ports with Flow Control 2x 6-Pin JST-GH 1 is connected to Jetson’s UART1 Port 16 PWM Outputs 2x 10-Pin JST-GH UART4 & I2C Port 6-Pin JST-GH 2x Gigabit Ethernet port Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S) 8-pin JST-GH RJ45 AD & IO 8-Pin JST-GH USB 2.0 USB-C 4-pin JST-GH DSM Input 3-pin JST-ZH 1.5mm Pitch RC in PPM/SBUS 5-pin JST-GH SPI Port External Sensor Bus (SPI5 11-Pin JST-GH 2x Debug Port 1 for FMU 1 for IO 10-Pin JST-SH Dimensions (Without Jetson and Flight Controller Module) 126x80x38mm Weight With Jetson, Heatsink, Flight Controller, M.2 SSD, M.2 Wi-Fi Module 203.2g Follow us World Drone Market on our YouTube to view more about the Holybro Pixhawk Jetson Baseboard.
Related products
-
$ 97.26
Hobbywing XRotor X13 series -
$ 15.29
Hobbywing Skywalker ESC -

$ 90.34
Hobbywing XRotor X6 Plus system -
$ 62.99
Hobbywing Data Link V2






